




HarmonyOS鸿蒙Next中百度地图点聚合功能如何实现
HarmonyOS鸿蒙Next中百度地图点聚合功能如何实现
我集成了百度地图SDK,版本是"@bdmap/base": "1.2.8" 但是现在要呈现的标记点有2000+,导致地图崩溃,有没有人知道鸿蒙next版百度地图SDK的点聚合功能如何实现

试试用 [@bdmap/map | OpenHarmony三方库中心仓](https://ohpm.openharmony.cn/#/cn/detail/@bdmap%2Fmap)
看看这个标记点 api 能不能满足你2000+的需求
绘制Marker点 | harmonynextsdk | 百度地图API SDK
更多关于HarmonyOS鸿蒙Next中百度地图点聚合功能如何实现的实战系列教程也可以访问 https://www.itying.com/category-93-b0.html

问题:百度地图点聚合2000+导致地图崩溃;
分析:百度地图本身不支持点聚合,但是也可以实现。
实现方式:
这里可以参考官方demo:
1.简单使用,参考文档:地图JS API示例 | 百度地图开放平台

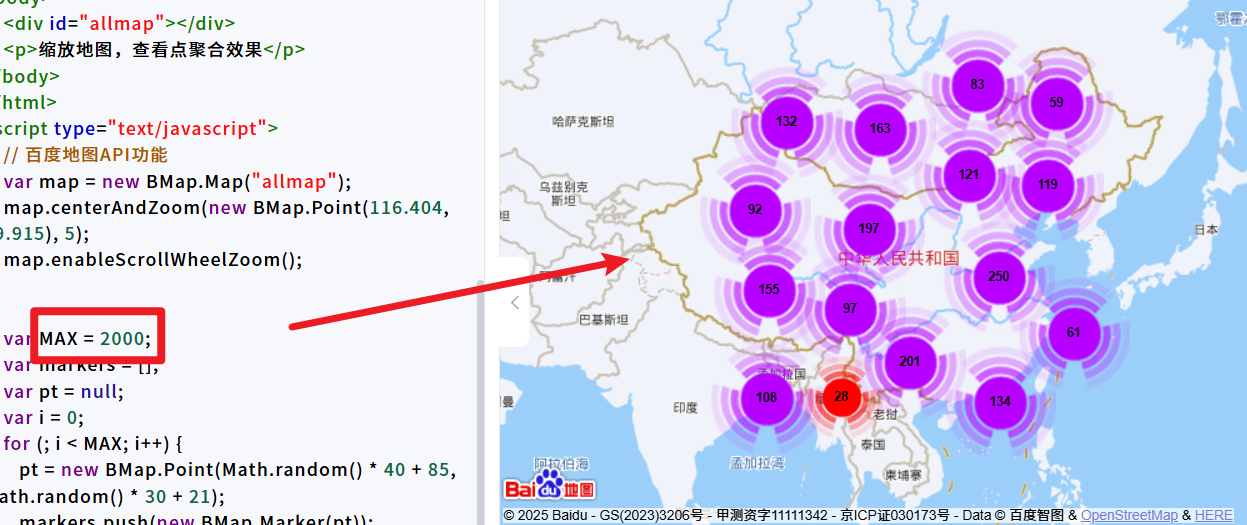
2.高级使用,demo参考文档:地图JS API示例 | 百度地图开放平台

以下也是一个简单的示例可以参考:
[@bmapgl-plugin/cluster - npm](https://www.npmjs.com/package/@bmapgl-plugin/cluster)
希望您有帮助,望采纳!

这个要参考百度地图的相关接口API文档,我刚刚去看了相关文档,你的问题应该就是地图视图显示以及Marker点显示相关,目前百度地图还没有像PetalMap一样提供官方的点聚合功能,需要自己根据Marker点的相关信息和点之间的距离去自己写相关点聚合的功能。
通过 getIsJoinCollision相关方法以及地图显示内容等综合情况去考虑点的过滤,从而减轻地图内容加载的负担,避免你说的崩溃
在HarmonyOS Next中实现百度地图点聚合功能,需使用HarmonyOS地图服务结合自定义开发。首先集成地图SDK,通过HarmonyOS的Map组件加载百度地图。点聚合通过ClusterManager管理,将相邻的Marker合并为聚合点。使用HarmonyOS的数据绑定和组件化能力,处理Marker数据源,根据缩放级别动态计算聚合逻辑。关键步骤包括初始化地图、添加Marker、配置ClusterManager,并利用HarmonyOS的UI组件渲染聚合视图。整个过程基于ArkTS开发,无需依赖Java或C。

在HarmonyOS Next中实现百度地图点聚合功能,可以通过以下步骤操作:
-
引入点聚合模块
确保在项目中引入百度地图的点聚合组件。在build-profile.json5的dependencies中添加:"dependencies": { "[@bdmap](/user/bdmap)/markerclusterer": "1.2.8" } -
初始化地图与点聚合
在页面中加载地图后,通过MarkerClusterer类初始化点聚合:import { MarkerClusterer } from '[@bdmap](/user/bdmap)/markerclusterer'; // 假设 map 为已初始化的地图实例 const cluster = new MarkerClusterer(map, { markers: markersArray, // 传入所有标记点数组 gridSize: 80, // 聚合计算网格大小(像素) maxZoom: 18, // 聚合最大缩放级别 styles: [{ url: 'cluster_icon.png', // 聚合图标 size: new map.Size(40, 40), // 图标尺寸 textColor: '#fff' // 文字颜色 }] }); -
处理大量数据
若标记点数据量极大(如2000+),建议分页加载或动态渲染。可通过监听地图视野变化,仅加载视野内的聚合点:map.on('moveend', () => { const bounds = map.getBounds(); // 根据 bounds 过滤数据,更新 cluster }); -
性能优化
- 使用轻量级图标,避免高分辨率图片。
- 根据缩放级别调整
gridSize,高缩放级别时减小网格以分散标记。
通过以上步骤,可有效解决大量标记点导致的地图卡顿问题,并实现高效的点聚合渲染。